58
Vinç &
Proje Taşımacılığı
Eylül - Ekim
2013
After the beginning
The second of the new series of practical
how-to articles aimed at improving safety in
heavy transport and lifting operations. Here
Marco van Daal explains the various types
of specialized transport equipment and the
terminology used in its reference
In terms of naming equipment a starting
point is in hydraulic platform transporters
versus trailers. An hydraulic platform
transporter distinguishes itself by the
hydraulic suspension of the axles and the
way these axles can be plumbed into axle
groups to ensure stability.
Another issue comes with the terms
“truck” or “prime mover” versus “power
pack” or “power unit”. Here is where the
difference between a pull-type transporter
and a self propelled transporter is made.
Prime movers are heavy duty vehicles,
attached to the transporter.
A self propelled transporter is not
equipped with a prime mover. The
transporter is therefore not pulled but it is
propelled by a unit of some sort – a power
pack. A power pack is a diesel engine and
one or more hydraulic pumps.
Why are there pull type and self
propelled transporters? It used to be that
the ever-increasing loads to be moved were
initially still pulled by a prime mover. It
started, however, to pose serious limitation
on the manoeuvrability and accuracy of
the transport. For starters, the turning
radius (especially in existing congested
infrastructure areas) was often a challenge.
A separate push and pull prime mover
was often used to overcome the turning
limitations. These kinds of exercises however
slowed down the transport and added to the
risk of handling heavy loads. The turning
radius of a self propelled transporter, on the
other hand, given its physical dimensions, is
smaller than its pulled counterpart.
Another limitation of a pull type
transporter is the accuracy of final
positioning over, for example, anchor bolts.
With a self propelled transporter, which is
electronically controlled, accuracies of a few
millimetres are achievable. Not necessarily
impossible with pull type transporters but
definitely much harder to achieve.
The second of the new series of practical how-to articles aimed at improving safety in
heavy transport and lifting operations. Here MARCO VAN DAAL explains the various
types of specialized transport equipment and the terminology used in its reference
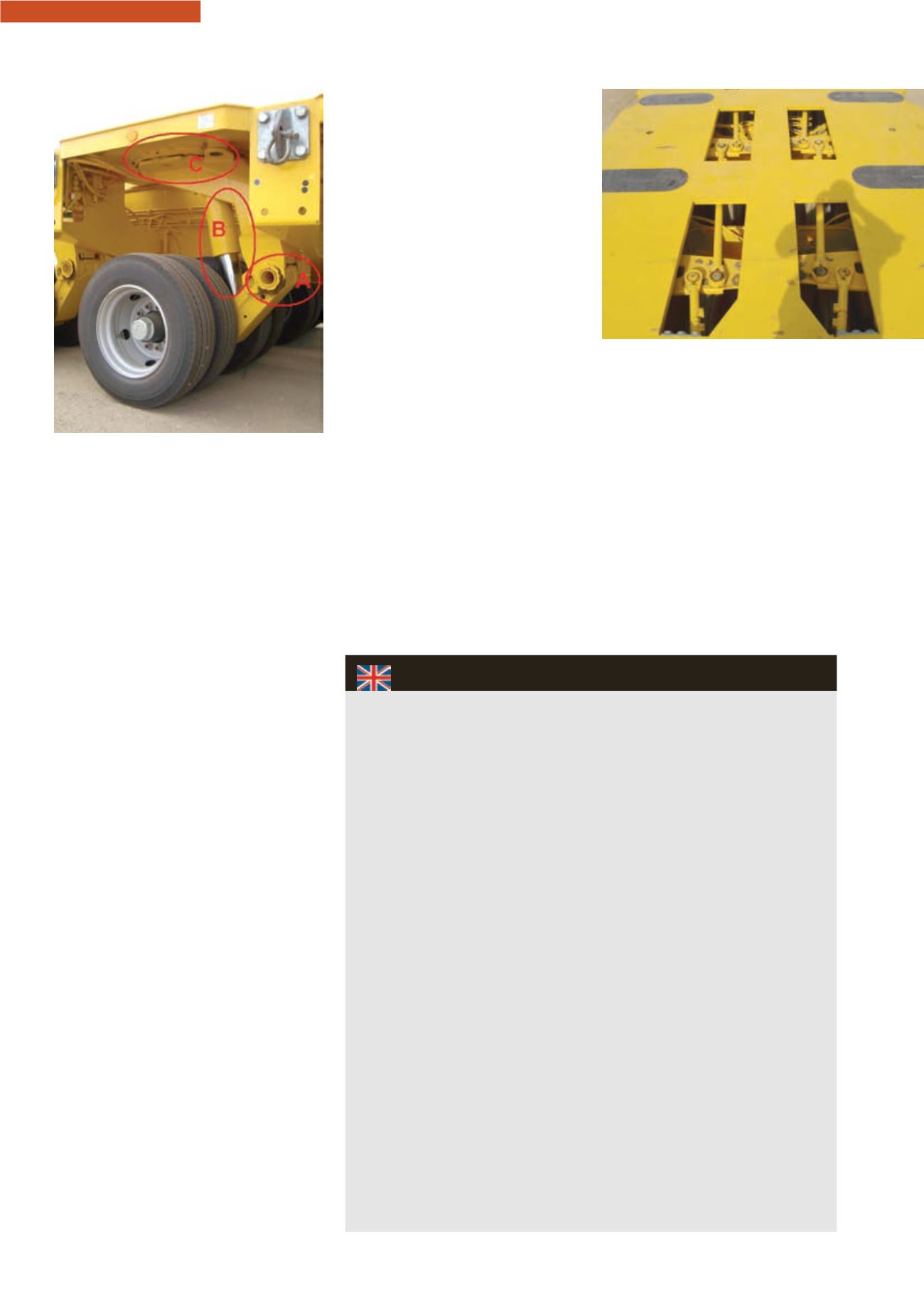
Askı tipi dingil tertibatının parçaları: dirsek
mafsal (A), hidrolik piston (B) ve dönüş
tablası (C)
Mekanik bir dümenleme sisteminde
kullanılan bağlantı rotları, taşıyıcı
tabanındaki boşluklardan görünüyor
BİLGİ BANKASI
edici özelliği sayılan hidrolik askı sistemini
meydana getiren de, bir araya getirilerek
farklı düzenlemeler oluşturabilen bu dingil
pistonlarıdır.
Askı tipi dingil tasarımı, terimler
arasında bir kargaşaya da neden olabilir.
Treyler dingillerinden bahsederken,
dingil dediğimizde tek bir dingili kast
ederiz. Askı tipi dingillerde ise, dingil
dediğimizde aslında iki dingil tertibatından
söz etmekteyiz. Bu nedenle, dingil yerine
“dingil dizisi” terimini tercih ediyoruz. Bir
dingil dizisi, hidrolik taşıyıcının sol ve sağ
kenarları arasındaki dingil tertibatlarını
içine alır.
Dönüş sistemi
Çekici ile hareket ettirilen hidrolik
taşıyıcıların dönüş hareketi, her bir dingilin
direksiyon rotu aracılığıyla bir sonrakine
başlanması yoluyla elde edilir. Dingilin
yan kısmına, dönüş tablasının hemen
altına yatay olarak bir plaka yerleştirilir. Bu
plakanın üzerinde, direksiyon rotlarının
bağlanabileceği delikler mevcuttur. Hangi
deliği kullanacağınız, taşıyıcı grubunun
uzunluğuna (dingil sayısına) bağlıdır,
çünkü her bir delik belli bir dönüş açısına
karşılık düşer. Bu dönüş bilgileri, üretici
firmanın temin ettiği direksiyon diyagramı
üzerinde gösterilir.
Burada, mekanik dümenlemeye
sahip hidrolik taşıyıcıların mutlaka çekici
ile kullanılan tipte olması gerekmediğini
belirtmeliyiz. Kendinden tahrikli hidrolik
taşıyıcılarda da mekanik dümenleme
sistemleri yaygın biçimde kullanılmakta. İkisi
arasındaki fark, çekici yerine bir güç ünitesinin
kullanılması ve belli sayıda dingile tahrik
motorlarının yerleştirilmesidir.
Elektronik dümenleme sistemi
ise sadece kendinden tahrikli hidrolik
taşıyıcılarda mevcuttur. Yukarıda
açıkladığımız plakalar ve rotlar yerine,
her bir dingil tertibatının dönüş tablası
üzerinde kedi döndürme mekanizması
vardır. Bu amaçla hidrolik pistonlar veya
sonsuz dişli çarklar kullanılabilir. Dingiller
arasında mekanik bir bağlantı bulunmaz.
Her dingile, güç ünitesinin merkezî işlemci
birimi (CPU) aracılığıyla, kumanda
kutusundan ayrı sinyal gelir. Bu CPU,
her dingilin, dönüş tablasının ne kadar
döndürüleceği konusunda doğru sinyal
almasını sağlar.
Dönüş farkı
Açıkladığımız gibi, elektronik dümenlemede,
dingiller arasında bağlantı sağlayan rotlar
bulunmaz. Bu, her bir dingilin diğerlerinden
bağımsız bir açıda dönüş yapabileceği
anlamına gelmektedir. Elektronik ve mekanik
dümenleme sistemleri arasındaki en önemli
fark işte budur. Mekanik dümenlemede
dingillerin yapabileceği dönüş açısı belli
sınırlar içindedir.
Bu nedenle, mekanik sistemlerde
manevra yeteneği elektronik sistemlere
kıyasla sınırlıdır. Bazı taşıma
uygulamaları, mekanik dümenleme
sisteminin altından kalkamayacağı
dönüşlerin yapılmasını gerektirebilir.
Yana doğru yapılan manevralar için
bu durum geçerlidir. Bu manevrada,
her dingil, taşıyıcının ekseniyle 90
derece açı yapacak biçimde döndürülür.
Mekanik sistemin bunu yapamayacağı
açıkça ortada. Mekanik dümenlemeli
hidrolik taşıyıcılar en iyi olasılıkla
diyagonal hareket yapabilir ve ancak
tekrar tekrar ileri-geri hareketle 90
derece yana doğru ilerleyebilir.
n


